

山东美安矿山设备有限公司
该用户未通过认证
该企业未通过实名认证,请谨慎交易!或者选择认证会员交易
18661328936
产品详情
免责声明:以下所展示的信息由会员自行提供,内容的真实性、准确性和合法性 由发布会员负责。中国路面机械网对此不承担任何责任。
友情提醒:为规避购买风险,建议您在购买相关产品前务必确认供应商资质(营业执照等证件)及产品质量。我们原则上建议您选择经过中国路面机械网认证的 守信通 会员
 矿用电机车防撞人激光雷达自主避障自动减速装置
矿用电机车防撞人激光雷达自主避障自动减速装置 详细信息
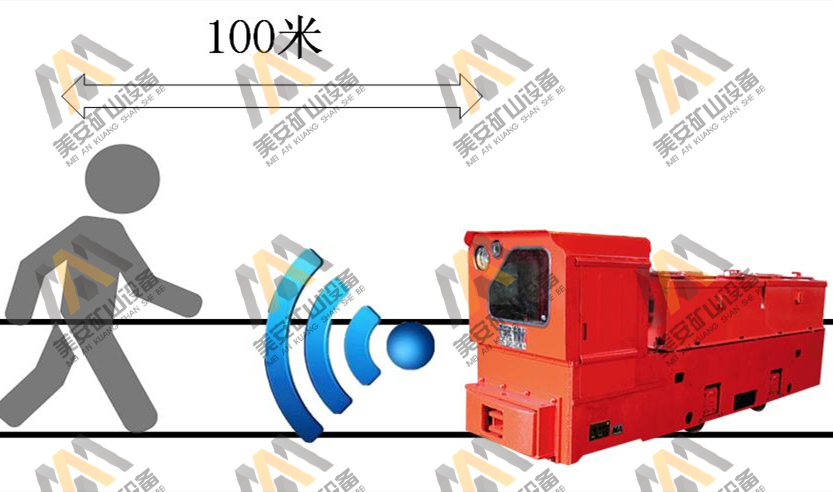
安装矿用本安型激光测距雷达安装在机车两端,可有效检测车辆前后方100米距离内人或物体(检测距离0-100米可调),检测信号传输到车辆驾驶室内的矿用本安型声光提示器进行声光提示,提示司机减速并可实现自动减速,达到及时防撞、安全驾驶的效果。
采用矿用本安型雷达(激光雷达),可同步显示机车前后后100米内障碍物进行语音报警,测度距离精que,误识别率低。可辅助司机在井下光照条件不好的情况,识别机车正前方后100米内障碍物和行人,防止碰撞。电机车通过激光雷达对轨道进行动态扫描,结合前端AI摄像仪智能图像分析识别前方障碍物并进行自主避让,保障行车的安全。
在电机车激光雷达识别到行人和障碍物的基础上,本装置可关联电机车调速系统,在司机来不及做出减速操作前,让电机车自动减速。防止电机车撞到行人和障碍物。
激光雷达探测机车倒车后方周围100米范围内的情况,遇到障碍物发出语音告警,并在配接的矿用本安型显示器上显示到达障碍物的距离,帮助司机保护机车及周围行人的安全。司机无须回头便可知机车后方有无障碍物和行人,使停车和倒车轻松且安全。
激光雷达避障技术是利用激光束测量距离和检测周围障碍物的一种技术。它通过发she激光束并接收反射的激光信号,以确定与目标的距离和位置。激光雷达避障技术在电机车无人驾驶自动驾驶、机器人导航、无ren机飞行等领域中得到广泛应用。
激光雷达避障技术的原理基于时间差测量(Time of Flight,TOF)和相位差测量(Phase Shift)两种方式。
